



AGIBOT’s robotic has a dexterous design to gather and use knowledge. Supply: AGIBOT
As robotics analysis strikes past managed lab settings into real-world environments, the demand for large-scale, high-quality knowledge has develop into more and more crucial, in line with AGIBOT. The corporate at the moment launched AGIBOT WORLD 2026, an open-source heterogeneous dataset it stated is designed to systematically assist 5 key analysis pathways in embodied intelligence.
“The dataset features structured, high-quality, and precisely annotated real-world robot data, providing developers and researchers with a robust foundation for training next-generation embodied AI systems,” stated AGIBOT.
Editor’s observe: On the 2026 Robotics Summit & Expo on Might 27 and 28 in Boston, there will probably be periods on embodied and bodily AI, in addition to on humanoid robotic improvement. Registration is now open.

AGIBOT WORLD follows free-form data-collection technique
AGIBOT WORLD 2026 spans a variety of real-world environments, together with industrial areas, houses, and on a regular basis eventualities. AGIBOT stated this captures the complexity, variability, and unpredictability that robots should deal with in follow.
In contrast to typical datasets constructed on repetitive and scripted demonstrations, the Shanghai-based firm has taken free-form data-collection method, wherein teleoperators dynamically carry out duties primarily based on real-time circumstances.
It claimed that this technique can considerably improve variety inside every episode and enhance generalization throughout a number of dimensions, together with object classes, preliminary configurations, and activity execution sequences. AGIBOT stated its robotic makes use of a versatile wheeled base, articulated head and waist actions, and lift-pitch capabilities for environment friendly, pure, and extremely transferable knowledge assortment.
In parallel, AGIBOT constructs 1:1 digital twin environments in simulation, with all corresponding simulation knowledge launched alongside the real-world dataset

AGIBOT says free-form knowledge assortment ensures complete generalization. Supply: AGIBOT
Improvements bridge the hole between knowledge, actual robotic habits
“A fundamental question in embodied AI remains: Does the data truly reflect how a robot operates as an integrated system?” famous AGIBOT. To handle this, the corporate has launched a number of options:
- Complete-body management (WBC): This permits coordinated management of arms, waist, and fingers, permitting robots to carry out duties extra fluidly as a unified system reasonably than by remoted motions.
- First-person beyond-visual-range teleoperation: The robotic’s notion is aligned with that of the operator, enabling extra intuitive, steady, and transferable management.
- Power-controlled knowledge assortment: AGIBOT stated it has integrated contact dynamics and power suggestions, capturing not solely movement trajectories, but in addition actual bodily interactions.
“Together, these capabilities ensure that the dataset more accurately represents real-world robot behavior,” asserted the corporate.

Complete-body management permits for clean motion of your entire robotic. Supply: AGIBOT
Industrial-grade {hardware} feeds the information pipeline
AGIBOT defined that the dataset is collected on its G2 {hardware} platform, which integrates high-performance joint actuators, multi-modal sensors, and a high-performance area controller to assist exact power management and scalable improvement.
Outfitted with Zhixing 90D grippers and the dexterous OmniHand, the G2 captures synchronized multi-modal knowledge—together with RGB(D), tactile alerts, lidar level clouds, IMU knowledge, and full-body joint states—inside a unified pipeline.
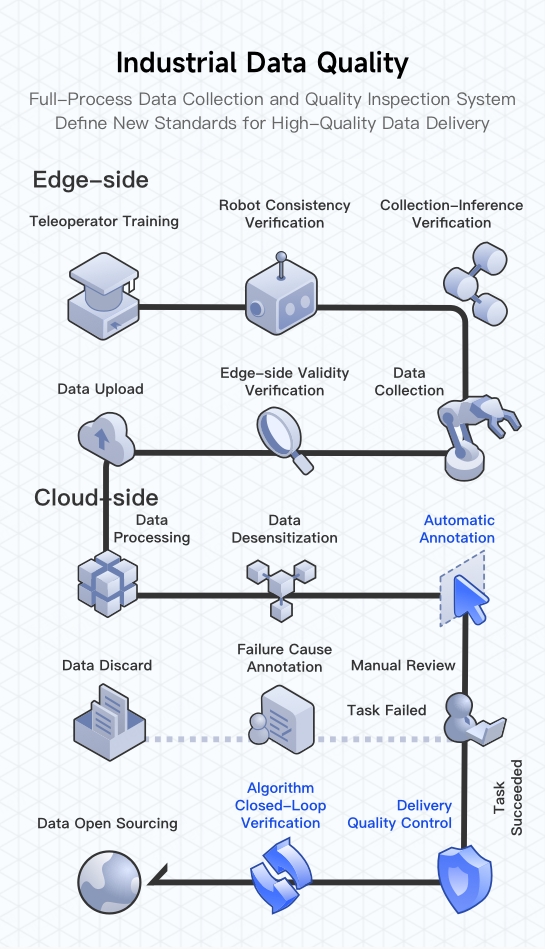
AGIBOT added that every knowledge episode undergoes rigorous cleansing and validation by its “industrial-grade” data-processing system, making certain readiness for large-scale mannequin coaching and analysis functions.
Supply: AGIBOT
Part 1 launch: Imitation studying
The corporate stated it plans to launch AGIBOT WORLD 2026 in 5 phases, every aligned with a core analysis route in embodied intelligence.
The primary launch focuses on imitation studying, a key paradigm that permits robots to accumulate complicated bodily expertise from knowledgeable demonstrations. This part contains a whole bunch of hours of real-world knowledge collected primarily in industrial and repair environments. The dataset combines:
- Process-level descriptions (segment-level directions)
- Motion sequences (step-by-step execution)
- Atomic ability labels (e.g., pull, place)
- Object annotations (2D bounding containers and attributes corresponding to title and shade)
“Importantly, error-recovery trajectories are also retained and annotated,” stated AGIBOT. “This hierarchical annotation framework—spanning from high-level tasks to low-level actions—provides the fidelity and corrective priors needed to train more robust and adaptive embodied agents.”
AGIBOT WORLD 2026 makes use of a hierarchical annotation framework. Supply: AGIBOT
AGIBOT WORLD a part of a long-term dedication to embodied AI ecosystem
AGIBOT stated it’s amongst a small group of startups taking a long-term, infrastructure-driven method to embodied intelligence.
Recognizing early that high-quality knowledge is foundational to unlocking the following era of robotic capabilities, the corporate has constantly open-sourced million-scale real-world and simulation datasets.
AGIBOT stated this effort displays its broader objective in embodied intelligence: to democratize entry to high-quality robotic knowledge. Via the continued evolution of the AGIBOT WORLD ecosystem, the corporate goals to contribute to the worldwide robotics neighborhood and speed up the transition of embodied AI from analysis labs into real-world functions.
AGIBOT WORLD 2026 trains on real-world eventualities. Supply: AGIBOT
The publish AGIBOT WORLD 2026 dataset is open-source to speed up embodied AI improvement appeared first on The Robotic Report.