



AGIBOT compares GO-2’s efficiency towards different main fashions. | Supply: AGIBOT
AGIBOT at present launched GO-2, its next-generation basis mannequin for embodied AI. The corporate stated GO-2 bridges the “last mile” from logical reasoning to specific execution inside a unified structure.
Constructing on its predecessor, GO-1, GO-2 introduces a unified structure that integrates logical reasoning and motion execution inside a single system. This allows AI robots not solely to plan accurately but in addition to execute reliably in real-world environments, stated AGIBOT.
GO-2 brings collectively tens of hundreds of hours of interplay information, claimed the corporate, marking a transition from “black-box exploration” to a “true unity of reasoning and action.”
GO Sequence evolves from notion to actuation
A yr in the past, AGIBOT launched the Genie Operator-1 (GO-1) basis mannequin. That includes the ViLLA structure, it unified modeling of imaginative and prescient, language, and motion. Right this moment, AGIBOT built-in the mannequin into its one-stop embodied growth platform, Genie Studio, empowering customers to deploy fashions and validate them in large-scale real-world functions.
GO-1 taught robots to “understand.” It may interpret directions, acknowledge scenes, and plan duties, stated the corporate. Nevertheless, as techniques entered extra advanced real-world environments, a vital concern emerged: even with an inexpensive plan, the robotic’s actions didn’t all the time strictly adhere to it.
This isn’t a failure of planning; it’s a fracture between reasoning and execution, asserted AGIBOT. It stated the core trigger is a long-standing problem in robotics: the “semantic-actuation gap.”
In conventional vision-language-action (VLA) fashions, the high-level reasoning indicators and real-world motor instructions stay disconnected. Throughout execution, management modules typically bypass reasoning indicators, resulting in collected errors in long-horizon duties and decreased system stability, famous the Shangha-based firm.
GO-2 achieves ‘unity of reasoning and motion’
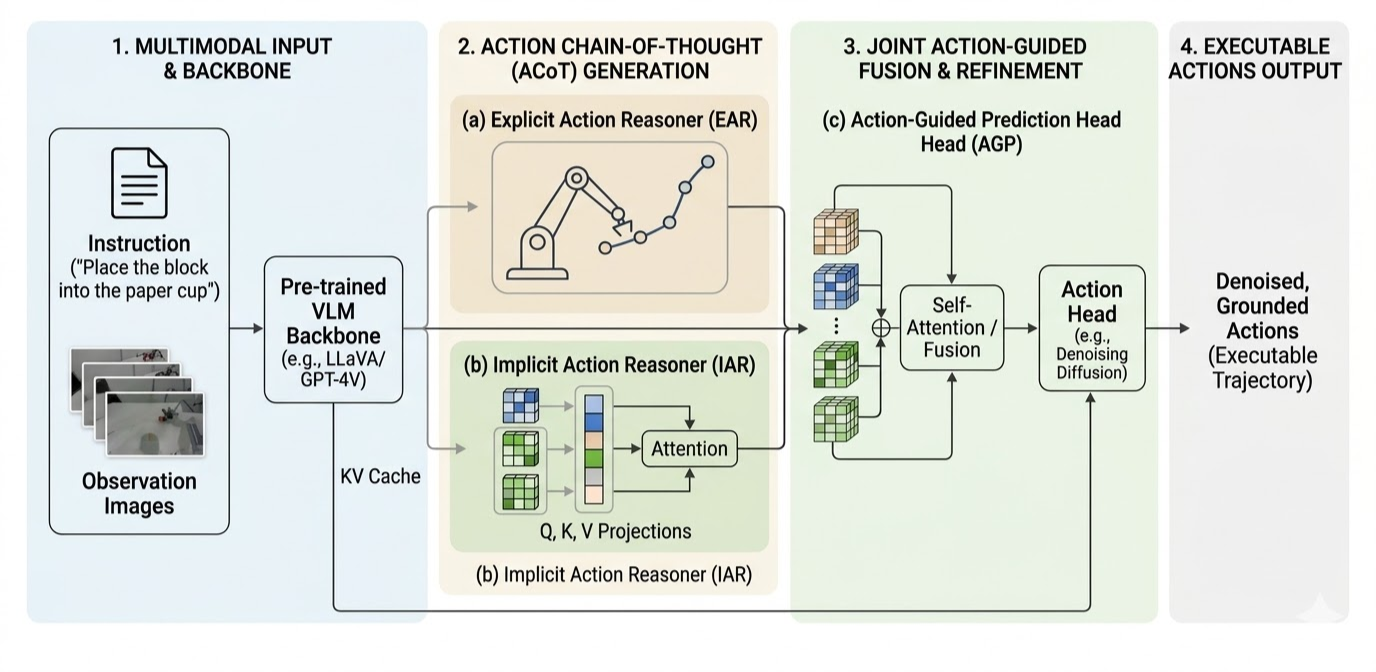
GO-2 performs reasoning utilizing an motion chain-of-thought. | Supply: AGIBOT
To attain the unity of reasoning and motion, stated AGIBOT, a system should clear up two key issues concurrently:
- Easy methods to generate “executable” motion plans by means of deep spatial reasoning
- How to make sure steady execution of these plans in actual environments
AGIBOT stated it addresses these by means of an structure constructed on two improvements. The primary is motion chain of thought. Not like conventional fashions that map directions on to uncooked motor instructions, GO-2 generates a high-level sequence of motion intents as a macro plan.
Much like how a human mentally simulates the arc of a basketball shot earlier than releasing the ball, GO-2 makes this course of specific. By way of action-level reasoning, the robotic plans an entire behavioral path and executes it step-by-step. Complicated duties are naturally decomposed into ordered levels, making certain that execution is constructed upon a basis of clear, logical reasoning, defined AGIBOT.
The second is asynchronous dual-system low-frequency planning, high-frequency following. The corporate stated high-level reasoning alone can not assure steady execution in real-world environments stuffed with noise and disturbances.
To unravel this, GO-2 introduces an Asynchronous Twin-System structure to translate high-level reasoning into exact robotic actions. A semantic planning module operates at a decrease frequency, performing as a “general commander.” This module generates structured high-level motion sequences. These are offered by means of progressive refinement, making certain that the reasoning itself is inherently “executable,” offering steady geometric anchors for management.
An action-following module, however, operates at a better frequency. This acts as an “agile executor” that repeatedly receives high-level intents and combines them with real-time observations to generate particular management indicators, performing residual refinement to compensate for environmental noise.
AGIBOT stated these two techniques are deeply aligned. To make sure that execution strictly adheres to reasoning, GO-2 makes use of a teacher-forcing mechanism throughout coaching. It teaches the mannequin to carry out robustly even underneath “approximately correct but imperfect” reasoning circumstances.
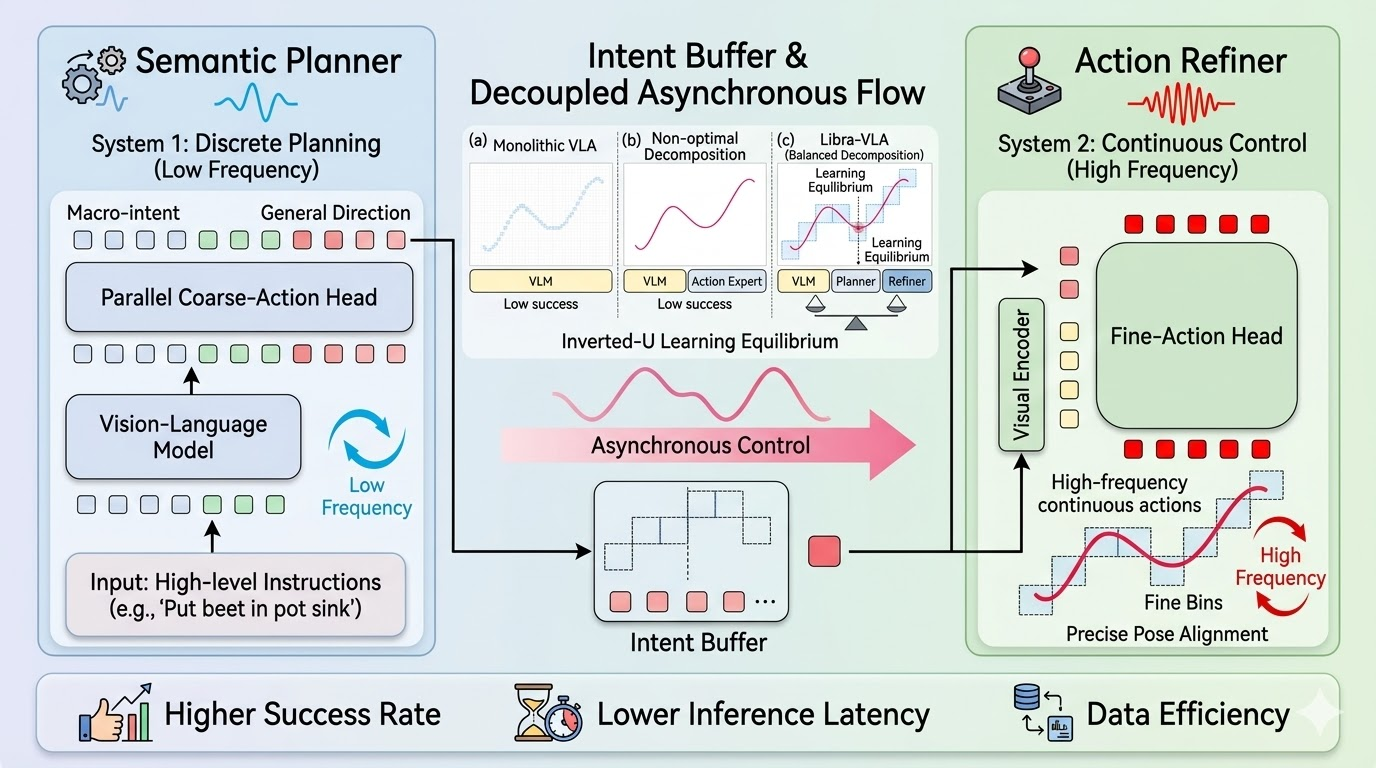
AGIBOT’s GO-2 makes use of a decoupled asynchronous movement. | Supply: AGIBOT
GO-2 performs throughout completely different benchmarks
By bridging reasoning and motion, AGIBOT stated GO-2 achieves “a paradigm shift” in behavioral efficiency, considerably outperforming present mainstream fashions like π0.5 and NVIDIA GR00T:
- LIBERO benchmark: GO-2 ranks first throughout spatial, object, objective, and lengthy duties, with a mean success fee of 98.5%.
- LIBERO-Plus benchmark: In environments with varied disturbances, GO-2 achieved an 86.6% zero-shot success fee.
- VLABench benchmark: In rigorous checks for cross-category and texture generalization, GO-2 achieved a mean rating of 47.4, notably outperforming present strategies in dealing with numerous object textures and unseen classes.
- Genie Sim 3.0 (Sim-to-Actual): Skilled solely on simulation information, GO-2 achieved an 82.9% success fee in real-world testing.
From mannequin to deployment: enabling steady studying in the true world
Past mannequin efficiency, AGIBOT stated it’s extending GO-2 into real-world deployment by means of a pre-training + post-training + information suggestions loop paradigm. Built-in with Genie Studio, the system allows:
- Steady information assortment throughout fleets of robots
- Cloud-based collaborative coaching
- On-line post-training in real-world environments
This infrastructure helps large-scale deployment and ongoing enchancment, stated the corporate. It will probably assist hundreds of robots in distributed coaching and obtain round 10 occasions enchancment in coaching effectivity.
The mannequin also can scale back process startup time to simply minutes, allow minute-level convergence in industrial duties, and improves charges by two to 4 occasions whereas lowering information necessities by over 50%.
This transforms GO-2 from a static mannequin right into a repeatedly evolving embodied system, in line with AGIBOT.
Editor’s notice: On the 2026 Robotics Summit & Expo on Might 27 and 28 in Boston, there can be periods on embodied and bodily AI. Registration is now open.

AGIBOT strikes towards embodied brokers with reminiscence
Past steady execution, AgiBot is exploring the subsequent frontier: can robots bear in mind and turn into smarter over time?
Its newest analysis introduces the OpenClaw Reminiscence System (arXiv:2603.11558), offering robots with long-term reminiscence to reuse reasoning traces from historic interactions.
By combining motion reasoning, hierarchical execution, and long-term reminiscence, AGIBOT stated it hopes to kind an entire clever loop: from notion to reasoning to motion to reminiscence.
The submit AGIBOT releases GO-2 basis mannequin for embodied AI appeared first on The Robotic Report.