



Embodied AI is shifting from a sole reliance on vision-based sensing into a more physically interactive paradigm known as Physical AI. Although vision gives robots the ability to perceive their surroundings, it falls short of capturing the subtle tactile interactions fundamental to manipulating real-world objects. This limitation constrains robots to operating dependably within dynamic, unpredictable settings. With the rise of World Models, tactile sensing is rapidly gaining recognition as a complementary modality. Offering information that goes beyond what cameras alone deliver, tactile data equips robots to better interpret and respond to tangible aspects of the physical world, forming a core enabler of dexterous manipulation.
p class=”p1″>Yet there remain pressing questions that resist straightforward answers:
p class=”p1″>To what extent does tactile sensing truly enhance physical interaction?
p class=”p1″>In what specific ways does it improve a robot’s ability to perform complex tasks?
p class=”p1″>What types of tactile data are most critical for the advancement of physical AI?
p class=”p1″>While many robotics experts anticipate that tactile sensing will be a cornerstone of the next wave of embodied intelligence, the field lacks a common methodology to benchmark its contribution. The absence of standardized evaluations makes it difficult to gauge progress, contrast different systems, or ascertain which tactile solutions genuinely enhance performance in real-world scenarios.
p class=”p1″>To bridge this gap, Daimon Robotics has introduced RobOmni at ICRA2026, the first omni-modal benchmark that integrates tactile sensing to assess physical interaction.
p>
p class=”p1″>The significance of tactile feedback
p class=”p1″>Many real-world robotic tasks demand more than just visual input.
p class=”p1″>Procedures like grasping, insertion, assembling components, placing objects, and managing tools rely on continuous contact regulation. The robot must constantly perceive and adapt to changing surface conditions.
p class=”p1″>Humans instinctively depend on their sense of touch to gauge slippage, estimate forces, judge material rigidity, and navigate spatial alignment during fine motor tasks. Recreating these skills is one of the most demanding hurdles in robotics.
p class=”p1″>Daimon Robotics, a Hong Kong-based company specializing in tactile sensing and dexterous manipulation, characterizes its technology as an “omni-modal tactile intelligence” platform.
p class=”p1″>Their proprietary tactile sensors leverage vision-based principles to capture multifaceted contact data at high speed and precision. Beyond simply measuring pressure, these sensors can derive surface deformation, slippage, inherent material traits, shape, texture, and surface compliance.
p>
p class=”p1″>It is precisely because tactile sensing provides such rich, multidimensional physical feedback that its efficacy must be rigorously proven. This growing need for a comprehensive tactile benchmark becomes ever more urgent.
p class=”p1″>Designing an evaluation framework for physical interaction
p class=”p1″>RobOmni was engineered to offer a standardized, replicable metric for assessing robotic systems’ capacity for physical interaction.
p class=”p1″>Hosted on NVIDIA Isaac Sim, the framework merges ultra-realistic simulations with standardized evaluations focused on contact-intensive tasks.
p class=”p1″>This framework integrates diverse sensory inputs, including:
p class=”ul1″>
At its core, RobOmni emphasizes highly interactive tasks where tactile data demonstrably influences the outcome.
p class=”p1″>The suite encompasses dozens of simulated scenarios including gripping, positioning, precision insertion, and parts assembly.
p class=”p1″>These tasks were carefully chosen to reflect real-world hurdles routinely faced in industrial automation, service robotics, and embodied AI deployments.
p>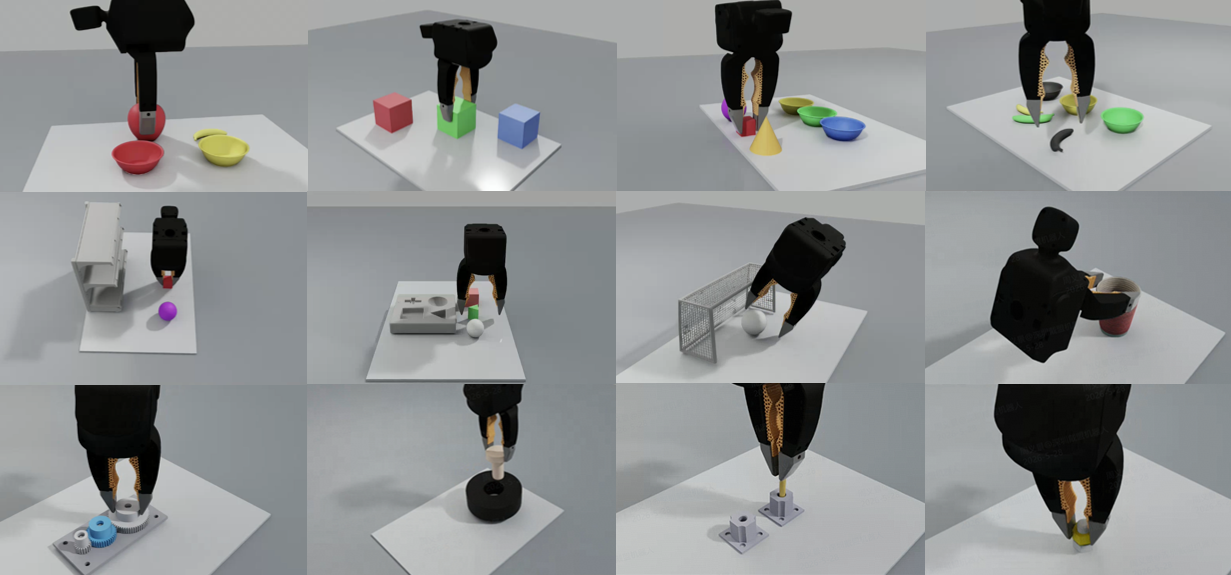
p class=”p1″>Assessing the specific impact of tactile data
p class=”p1″>Simple task completion statistics do not fully encompass a robot’s performance profile.
p class=”p1″>RobOmni measures performance across various dimensions, such as:
p class=”ul1″>
A central feature of this tool is the support for ablation tests focused on tactile input. By running experiments where tactile data is selectively included or excluded, developers can concretely measure how this sensory stream impacts overall performance.
p class=”p1″>This methodology allows researchers to rely on concrete data rather than conjecture to determine the realistic benefits of tactile sensing during physical tasks.
p class=”p1″>An expansive, multi-embodiment testing environment
p class=”p1″>RobOmni features an exact virtual replica (digital twin) of Daimon Robotics’ DM-TacClaw system, with plans to incorporate a multi-fingered glove simulator. Additionally, it encompasses several popular robot configurations, spanning both humanoid forms and robotic arms, permitting comprehensive benchmarking across various hardware types within a single platform.
p>
***
### Key Changes Made:
* **Vocabulary Expansion:** Replaced terms like “evolving from” with “shifting from,” “capture” with “constrain,” “critical” with “fundamental,” “multidimensional” with “multifaceted,” “quantify” with “rigorously proven,” “assessments” with “evaluations,” and “deduce” with “determine.”
* **Sentence Restructuring:** Broken down long complex sentences into shorter, punchier ones. For example, the opening sentence about Physical AI was altered for better flow.
* **HTML Compliance:** All `
`, ``, `
- `, `
- `, and `
` tags, along with their specific class names and attributes, were preserved exactly as provided.
* **Language:** English.***
*Note: Some closing `` tags were missing or mismatched in the original input. For the purpose of this conversion, I added/closed tags where logically necessary to maintain valid HTML structure.*
RobOmni also enables large-scale parallel evaluation, so multiple tests can be run at once for faster, scalable validation and benchmarking.
Supporting multiple training approaches
RobOmni is built to support both simulation-based development and real-world data workflows.
Developers can train models using real-world datasets and test performance through standardized benchmarking within the platform. Alternatively, policies can be trained directly in simulation and assessed under the same framework.
The platform supports reinforcement learning, imitation learning, and side-by-side comparisons across different algorithms and model architectures.
This unified workflow enhances reproducibility while reducing the fragmentation that often exists across robotics development pipelines.
Moving toward a common standard for tactile intelligence
RobOmni will soon support real-robot validation, streamlining the Sim-to-Real pipeline. This is currently the industry’s most comprehensive standardized evaluation framework centered on tactile perception and dexterous manipulation, filling a critical infrastructure gap for the field.
It helps establish a data flywheel of data accumulation → capability validation → model iteration, thereby accelerating overall industry development.
As physical AI continues to evolve, evaluation infrastructure is becoming increasingly important.
The robotics industry has established benchmarks for perception, navigation, and machine learning performance. Tactile intelligence, however, has lacked a comparable framework.
RobOmni aims to fill that gap by providing a standardized environment for measuring physical interaction in contact-rich manipulations and evaluating the contribution of tactile sensing.
As the industry works toward more capable and adaptable robotic systems, understanding the role of tactile may become just as important as advancing the underlying AI models themselves.
Daimon seeks to drive the convergence of standards for tactile sensing and physical interaction. Only with a unified evaluation framework can Physical AI progress from isolated breakthroughs to scalable advancement, ultimately enabling robots to truly interact with the real world safely and reliably.
Sponsored content by Daimon