



Scientists at Sakana AI and the University of Tokyo have introduced DiffusionBlocks, a new training framework that builds neural networks one piece at a time. Unlike conventional methods that process the entire model simultaneously, this approach cuts training memory usage by a factor of B — where B represents the total number of blocks — while delivering comparable results across a wide range of model designs.
Why Memory Becomes a Bottleneck During Training
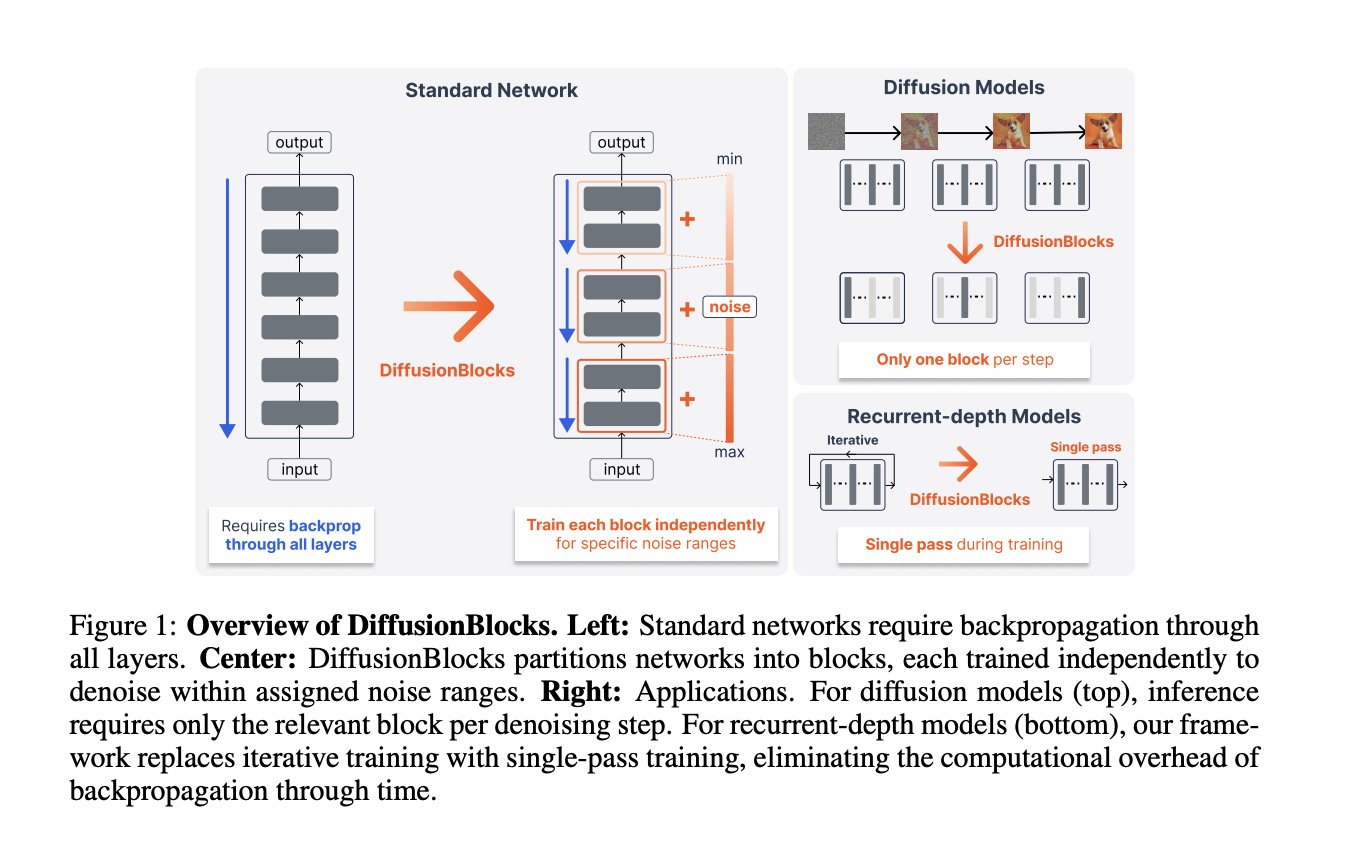
Standard end-to-end backpropagation works by saving every intermediate activation across all layers during a forward pass. Because memory needs increase in direct proportion to the number of layers, this quickly becomes a serious limitation as architectures grow deeper and more complex.
A commonly used workaround, called activation checkpointing, alleviates some of this burden by discarding certain activations and recomputing them later when needed. However, this technique does nothing to reduce memory tied up by model parameters, gradients, or optimizer states. When using the Adam optimizer, each layer must hold space for its own parameters, their gradients, and two optimizer states (one for momentum and one for variance). That adds up to four times the parameter count per layer — a figure that activation checkpointing leaves untouched.
An alternative strategy, block-wise training, takes a different path. By splitting a full network into B separate blocks and training them independently, memory requirements drop to roughly 1/B of the original. The improvement scales directly with how many blocks are used. The main difficulty, though, lies in crafting a meaningful local training objective for each individual block — one that still adds up to a well-coordinated, high-performing whole.
Earlier methods such as Hinton’s Forward-Forward algorithm and greedy layer-wise training depend on handcrafted local objectives. These approaches have consistently fallen short of end-to-end training performance and remain mostly confined to classification problems.
DiffusionBlocks fills both the theoretical void and the practical limitations that have held back previous techniques.
The Core Insight: Residual Connections as Euler Steps
The foundational idea builds on a well-known observation from prior research. In a residual network, each layer transforms its input according to . Mathematically, this mirrors the Euler discretization of an ordinary differential equation.
The research team demonstrates that these layer updates map precisely onto the probability flow ODE found in score-based diffusion models. Under the Variance Exploding (VE) formulation, the reverse diffusion process is governed by:
Discretizing this equation with the Euler method yields an update rule whose structure is identical to the residual connection formula. Viewed through this lens, a sequence of stacked residual blocks functions like a series of denoising operations — each one tackling a progressively different noise intensity within a defined range of [𝞂min, 𝞂max]
In score-based diffusion
Because each block learns to predict the score matching objective at its specific noise level, the training can be run separately at every noise level. In practice, each block is trained on its own using only its own local loss. There is no need for any communication between blocks while training.
Converting a Network: Three Steps
To turn a standard residual network into DiffusionBlocks, you need to make three changes:
- Block splitting: Divide the network with L total layers into B sections. Each section is a contiguous group of layers.
- Assigning noise ranges: Pick a noise distribution pnoise and set a noise range
[σmin, σmax] - Adding noise conditioning: Expand each block’s input so it gets a noisy copy of the target. Use AdaLN (Adaptive Layer Normalization) to tell each block what noise level it is working with. Each block then learns to recover the clean target from its noisy version within the noise range it was assigned.
During each training step, only one block is sampled and run. The rest are skipped. Memory use scales with L/B layers instead of all L layers.
Equi-probability Partitioning
A simple uniform split cuts [σmin, σmax]
DiffusionBlocks instead uses equi-probability partitioning. The boundaries are chosen so that each block covers exactly 1/B of the total probability under pnoise. Blocks handling intermediate noise levels get narrower intervals, while blocks at extreme noise levels get wider ones.
In tests on CIFAR-10 using DiT-S/2 with block overlap disabled to test each component separately, equi-probability partitioning reached an FID of 38.03 compared to 43.53 for uniform partitioning (lower is better). Both setups used an even layer split of [4,4,4] across 3 blocks.
Experimental Results
The team tested DiffusionBlocks on five different network types across three types of tasks. All results compare DiffusionBlocks (trained in blocks) against the same network trained end-to-end with backpropagation.
| Architecture | Dataset | Metric | End-to-End | DiffusionBlocks | Memory Saved |
|---|---|---|---|---|---|
| ViT, 12 layers, B=3 | CIFAR-100 | Accuracy (higher is better) | 60.25% | 59.30% | 3x |
| DiT-S/2, 12 layers, B=3 | CIFAR-10 | FID test (lower is better) | 39.83 | 37.20 | 3x |
| DiT-L/2, 24 layers, B=3 | ImageNet 256×256 | FID test (lower is better) | 12.09 | 10.63 | 3x |
| MDM, 12 layers, B=3 | text8 | BPC (lower is better) | 1.56 | 1.45 | 3x |
| AR Transformer, 12 layers, B=4 | LM1B | MAUVE (higher is better) | 0.50 | 0.71 | 4x |
| AR Transformer, 12 layers, B=4 | OpenWebText | MAUVE (higher is better) | 0.85 | 0.82 | 4x |
| Huginn recurrent-depth model | LM1B | MAUVE (higher is better) | 0.49 | 0.70 | ~10x compute |
Forward-Forward comparison: On CIFAR-100, the Forward-Forward algorithm managed only 7.85% accuracy with the same ViT setup. This shows the big difference between improvised contrastive objectives and the score matching objective behind DiffusionBlocks.
Faster DiT inference: For diffusion models, each denoising step only needs one block. A 12-layer DiT with B=3 runs just 4 layers per step. This cuts inference compute by 3x compared to running all 12 layers every time.
Training Huginn models: Huginn reuses the same 4-layer block many times in a loop with stochastic recurrence, averaging 32 passes. Training uses 8-step truncated backpropagation through time (BPTT). DiffusionBlocks swaps this for a single forward pass per training step. The multi-step inference is kept as-is. Even though DiffusionBlocks trains for 15 epochs versus Huginn’s 5 epochs, the 32x reduction in steps leads to roughly 10x less total compute.
OpenWebText results: On OpenWebText, DiffusionBlocks scored 0.82 on MAUVE versus 0.85 for the baseline. Generative perplexity measured with Llama-2 was 14.99 versus 15.05. Performance was mixed, with some scores slightly below the baseline.
Handling masked diffusion: For masked diffusion models, blocks are split based on the masking schedule instead of noise levels. Each block gets an equal drop in the unmasking probability alpha(t), which keeps the parameter workload balanced across blocks.
Comparison with NoProp
NoProp is a related method that also uses a diffusion setup to train without backpropagation. It has only been tested on classification tasks with a custom CNN architecture, and no guidelines are given for applying it to other models or tasks.
| Method | Uses continuous time | Trains by block | Accuracy on CIFAR-100 |
|---|---|---|---|
| Standard backpropagation | No | No | 47.80% |
| NoProp-DT | No | Yes | 46.06% |
| NoProp-CT | Yes | No | 21.31% |
| NoProp-FM | Yes | No | 37.57% |
| DiffusionBlocks (ours) | Yes | Yes | 46.88% |
DiffusionBlocks is the only approach that combines continuous-time modeling with block-wise training, and stays within 1% of the end-to-end backpropagation baseline.
Strengths and Weaknesses
Strengths:
- Built on solid theory through score matching rather than fast-hand local objectives
- Applies to five different network types without task-specific changes
- Training memory scales by a factor of B, where B is the number of blocks
- For diffusion models, inference compute also drops by B× during generation
- Equi-probability partitioning clearly beats uniform partitioning (FID 38.03 vs 43.53 on CIFAR-10)
- Eliminates the need for multi-step BPTT in recurrent-depth models, using just one forward pass
- Blocks can
- Can be trained in parallel across GPUs without any communication overhead
- Using a small number of blocks (B=2 or B=3) can sometimes yield better FID scores compared to training the entire network end-to-end
Weaknesses:
- Input and output dimensions must match; the method does not yet work with U-Net-style architectures where dimensions change across the network
- Only tested on models trained from scratch; whether it works when fine-tuning models that were pretrained in the usual way remains unclear
- No systematic rule exists for choosing the best number of blocks for a given model architecture and task
- Noise conditioning introduces extra computation: the combined wall-clock training time rises to 0.0543 seconds compared to 0.0507 seconds for standard training
- On the OpenWebText dataset, certain performance metrics fall slightly behind the standard autoregressive baseline
Marktechpost’s Visual Explainer
DiffusionBlocks · Sakana AI
ICLR 2026 · Block-wise Training
01 / 10
Key Takeaways
- DiffusionBlocks splits residual networks into B separate, independently trainable blocks, cutting training memory usage by a factor of B
- In transformers, residual links correspond to Euler steps in the reverse diffusion process, offering a theoretically justified local learning goal for each block
- Equi-probability partitioning divides noise ranges so each block handles equal likelihood mass, which greatly improves FID in image generation compared to uniform splitting
- Tested successfully across five different architectures: ViT, DiT, masked diffusion, autoregressive, and recurrent-depth transformers
- For recurrent-depth models such as Huginn, it replaces K-step BPTT with a single forward pass, slashing total training compute needs by about 10 times
Check out Research Paper, Repo, and Technical details. Also, follow us on Twitter and join our 150k+ ML SubReddit and our Newsletter. Are you on Telegram? We’re on Telegram too!
Interested in partnering with us to promote your GitHub Repo, Hugging Face Page, Product Release, Webinar, or other announcement? Reach out to us!