



A phase regulator can make AMR fleet coordination more reliable and foreseeable. Source: VisualNest AI, Adobe Stock
Predictability isn’t the same as stability. In an earlier piece, I introduced a priority-focused framework designed to make autonomous mobile robots—AMRs—more predictable in their actions. Before diving into the concept of phase regulation, let’s quickly recap the foundational ideas I put forward:
- Tiered mission structures
- Well-defined entities for interaction
- Decision-making levels shaped by context
- Neutral-autonomous status to ensure legal predictability
The aim was structural clarity—determining who makes decisions, which mission they serve, and under what constraints. That said, having a clear structure on its own doesn’t ensure smooth, stable behavior in real-world operations. AMRs navigating warehouses, hospitals, or retail spaces constantly deal with unpredictable conditions:
- Obstacles that appear without warning
- Sudden surges in pedestrian traffic
- Mismatches in mapping data
- Glitches and noise from sensors
- Conflicting recovery pathways
When things go wrong in these scenarios, it’s rarely a mechanical breakdown—it’s a computational overload. Robots lock up in indecision. They flip back and forth between competing behaviors. They blow out their search trees unnecessarily. They take too long to reach a definitive decision. This article presents a supervisory control layer engineered to rein in exactly this kind of instability.
The core issue: Combinatorial overload
Today’s autonomous mobile robots bring together a complex mix of subsystems:
- SLAM (simultaneous localization and mapping) or localization filters
- Global and local path planners (A*, Hybrid A*, RRT*, MPC)
- Behavior trees
- Failure recovery mechanisms
- Learned control policies
Each of these components tends to perform reliably in isolation. The trouble surfaces at the point where they’re woven together. As the environment grows more complicated, planners explore more nodes. As ambiguity rises, the Behavior Tree toggles between branches more often. As obstacle maps grow denser, reactive controllers grow more aggressive in their corrections.
The outcome isn’t a mechanical failure—it’s computational blowup. It’s not a flaw in any single algorithm. It materializes when outside environmental pressure and internal disagreements within the control stack ramp up at the same time.
This reflects an acceleration in the system’s structural dynamics—where the external task gradient (ΔN) and internal behavioral divergence (ΔD) are both swelling together. Put simply, this means computational instability is growing at an accelerated pace. In real time, the impact is straightforward: latency creeps up, the processor is pushed to its limits, and the decision cycle becomes unpredictable. It’s precisely at this juncture that a higher-level supervisory response is needed—before the system spirals into oscillation or gets stuck entirely.
How to curb runaway complexity without sacrificing search effectiveness
Through combinatorial experiments using a structural compression mechanism—referred to as the Combinatorial Compression Engine (CCE)—researchers showed that, with a well-organized search strategy, you can dramatically shrink the search space you explore while still arriving at valid solutions.
Even though those experiments were carried outside of robotics pipelines, the principle of imposing structural boundaries translates directly to AMR planning: rather than the number of alternatives growing exponentially, the system should actively cap search depth and limit branching in real time.
That’s exactly the job handled by the phase regulator outlined below. You can explore the structural compression principles in the open repository:

Overseeing AMR fleets turns complicated without phase regulators. Source: ShortFilmStock AI, Adobe Stock
Two-signal behavioral phase regulator
The proposal here is a lightweight supervisory overlay driven by two real-time signals.
ΔN serves as the external task gradient. It measures how far the current state has deviated from the target mission equilibrium. In the context of an autonomous mobile robot, ΔN may track:
- Trajectory tracking error
- Shift in the local planner’s cost function gradient
- Rate of change in obstacle density
- Expansion of uncertainty in localization estimates
- Degree of novelty in incoming sensor data
ΔN essentially answers: How hard is the environment pushing the system away from its stable operating point?
ΔD captures internal behavioral divergence. It signals conflict brewing within the decision-making stack. For an AMR, ΔD may reflect:
- How frequently the behavior tree toggles between branches
- Repeated triggering of recovery routines
- Spreading apart of alternative trajectory options
- High randomness in action selection
- Rapid, high-frequency swings in control outputs
ΔD answers: How much internal disagreement is there in the control process itself?
Why rely on these two parameters? Most systems track either how complex the environment is or how stable their controllers are. Very few tracks both simultaneously—and almost none actively regulate their interplay. To combine them, a straightforward nonlinear second-order model can be applied:
I = wN · ΔN + wD · ΔD + k · ΔN · ΔD
The cross-term surfaces a critical regime created when both external pressure and internal conflict climb together. Elevated ΔN on its own is workable. Elevated ΔD on its own is fixable. But when they combine, they trace a phase boundary of instability.
Phase regulation
The system’s current state can be classified into four operational zones:
| Zone | ΔN | ΔD | System response |
|---|---|---|---|
| Nominal | Low | Low | Full planning depth |
| Reactive | High | Low | Shortened planning horizon, reactive priority |
| Conflict | Minimal | Elevated | Branching limitation |
| Critical | Elevated | Elevated | Degraded mode |
The operational zones shown above are plotted on the ΔN – ΔD phase diagram (Figure 1)
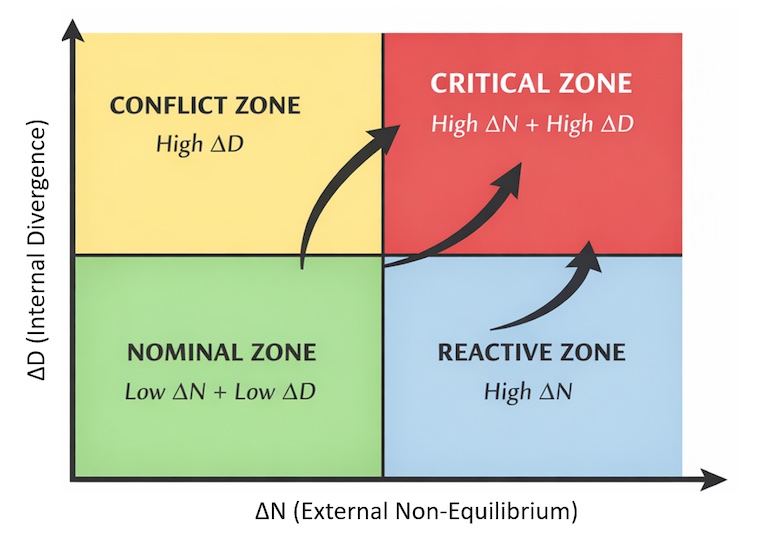
Figure 1. ΔN-ΔD phase map showing computational stability regions in AMR systems.
Figure 1. ΔN-ΔD phase map showing computational stability regions in AMR systems.
Both ΔN and ΔD can be derived from standard diagnostic data already available on the robot. ΔN represents a combined metric built from:
- Deviation from planned trajectory
- Expansion of extended Kalman filter (EKF) covariance
- Rate of change of the cost function
- Concentration of moving obstacles
ΔD — measures of internal disagreement include:
- Rate of behavior tree state changes
- Discrepancy between global and local path plans
- Fluctuation in control command values
KL-divergence between alternative trajectory options
No additional sensors are needed. The regulator combines existing data streams into a real-time stability indicator. This shifts instability monitoring from passive observation to active complexity management.
Integration into the AMR software stack
No redesign of the existing architecture is necessary. The phase regulator can be added as a standard ROS 2 node with the following functions:
- Listens to diagnostic message topics
- Calculates ΔN and ΔD at 50–100 Hz
- Broadcasts the current instability index
- Adjusts planner settings on the fly
Adaptive responses may include:
- Shortening the maximum planning time
- Decreasing path search depth
- Limiting the number of branching alternatives evaluated
- Turning off computationally heavy behavior subtrees
- Falling back to a lightweight local planner
This approach ensures processing delays stay within acceptable bounds even when the environment becomes more complex.
Impact on safety certification
In earlier system designs, predictability was fixed by structure. With the phase regulator in place, predictability becomes an active, evolving property. The system continuously logs the instability index, identifies the current operational state, and records all transitions between states.
When behavioral complexity needs to be reduced, or when the system must enter a protective state, it happens by crossing a mathematically defined phase threshold — not by an error buildup. This enables constraints on complexity before the latency budget is breached, generation of documented criteria for entering safe mode, and traceable, repeatable analysis of what caused each transition.
A system that enters protective mode based on a measurable, quantifiable criterion is far easier to certify than one depending on arbitrary timeout thresholds.
Fixed structure meets adaptive phase control
The priority-based architecture determined which component holds decision-making authority. The phase regulator determines when system complexity must be actively restrained. Together, they deliver structural predictability, live stability monitoring, and adjustable computational load.
Unstructured environments impose combinatorial processing demands on robots. Controlling that demand is the next critical step in achieving dependable autonomous operation.
Practical guidance for AMR development teams
- If your robot locks up in a crowded space, track not only processing delay but also how often the behavior tree switches states — this signals internal instability (ΔD).
- If recovery routines start activating at a known threshold, the system has already entered the conflict zone. Immediately shorten the planning horizon.
- Rising obstacle density in the costmap should automatically shorten the planning horizon — otherwise growing ΔN triggers exponential path branching.
- Record every transition between operational zones. This greatly streamlines safety audits.
- Degraded operating mode must be explicitly defined and triggered by specific conditions, not by simple timeouts.

A phase regulator can prevent robot malfunctions
AMR systems rarely fail because of hardware breakdowns — they fail when the decision-making software becomes overwhelmed. The phase regulator using ΔN and ΔD makes it possible to:
- Enforce consistent latency limits
- Avoid oscillatory instabilities
- Enable predictable fallback behaviors
- Enhance reliability in real-world conditions It does not replace existing planners — it dynamically manages their computational load.
In dynamic settings, true stability is determined by how well the robot manages its own processing burden.
About the author
Zhengis Tileubay is an independent researcher based in the Republic of Kazakhstan, investigating the relationship between humans, autonomous systems, and artificial intelligence. His research centers on creating safe robot control frameworks and advancing new legal frameworks governing the status of autonomous technologies.
Through his research, Tileubay designed a behavior control architecture built on hierarchies of missions and interacting entities. He also introduced the concept of “neutral-autonomous status.”
Tileubay has filed a patent application titled “Autonomous Robot Behavior Control System Based on Hierarchies of Missions and Interaction Subjects, with Context Awareness” with the Patent Office of the Republic of Kazakhstan. Contact him at [email protected].