



Genesis AI has unveiled Genesis World 1.0, a new simulation platform built around four core technologies: the Genesis World physics engine, Nyx (a real-time path-tracing renderer), Quadrants (a Python-to-GPU compiler), and a simulation interface. The platform’s primary goal is to speed up the development of robotics foundation models by leveraging simulation during evaluation.
Robotics model development faces two major challenges: data availability and iteration speed. While the industry has largely focused on data, Genesis AI highlights a slower and often overlooked bottleneck — the model development cycle itself. The real issue, according to Genesis AI, is how quickly teams can assess candidate policies and benchmark model checkpoints against each other.
What Problem Does This Solve?
A standard policy evaluation at Genesis involves running hundreds of tasks, each with hundreds of episodes. Doing this in the physical world would take over 200 hours of non-stop robot operation — with just one operator and one robot station — for a single evaluation run. To get statistically reliable comparisons across multiple checkpoints, teams need to repeat this process many times over.
Genesis World 1.0 can complete the same evaluation in under 30 minutes, with no human involvement or physical hardware, and guarantees bit-identical results every time. This represents roughly a 100x speedup compared to real-world evaluation.
The research team made a deliberate choice to prioritize simulation for evaluation before using it for training data. Their logic: if training and evaluation draw from the same simulated distribution, an apparent performance gain might just mean the model fits the simulator’s quirks more closely rather than genuinely being better. Separating these two pipelines leads to clearer, more trustworthy results.
The team calls this evaluation approach zero-shot real-to-sim: policies tested in simulation are trained only on real-world data. Simulated data is never included in pretraining.
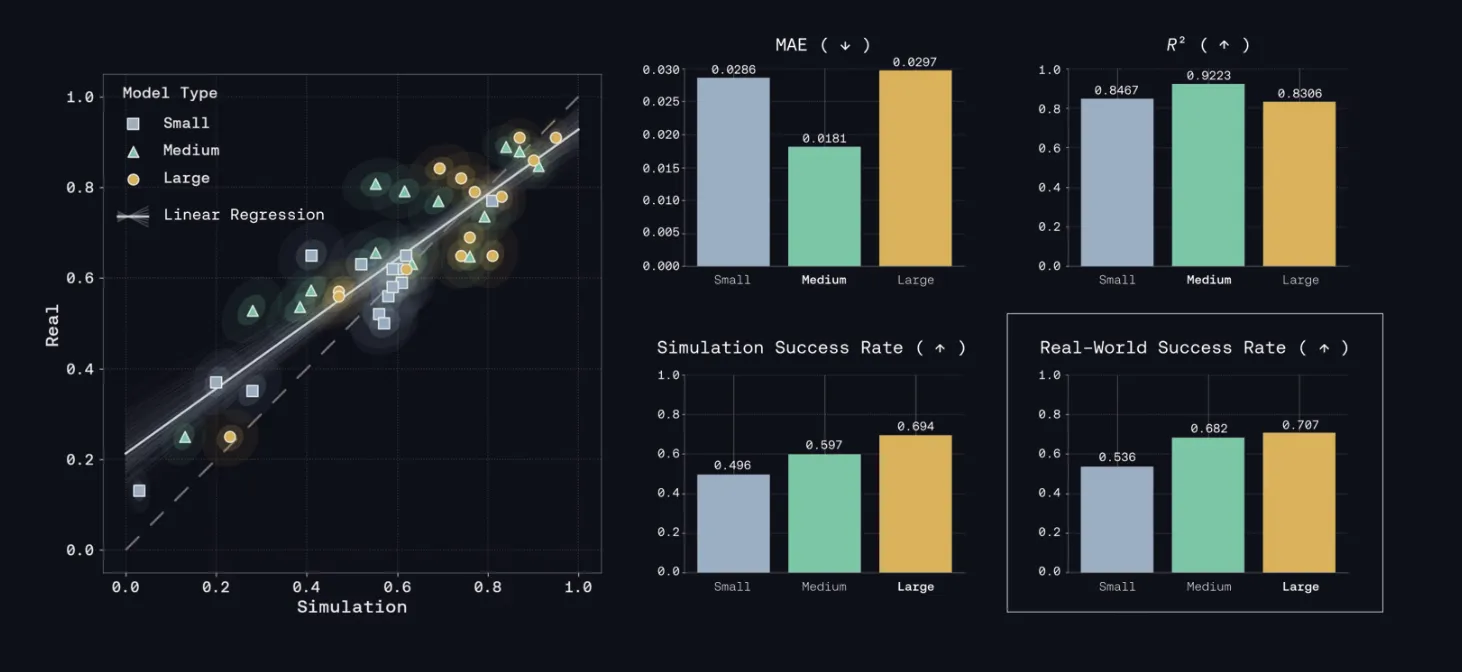
Sim-to-Real Correlation Results
Genesis researchers report a Pearson correlation of 0.8996 (95% CI: [0.7439, 0.9314]) between simulation outcomes and actual hardware rollouts. This evaluation spanned three model sizes (Small, Medium, Large) across 14 tasks with 200 episodes per task. The team conducted 1,000,000 bootstrap iterations to calculate confidence intervals.
The Mean Maximum Rank Violation (MMRV) — a metric introduced in SimplerEnv — came in at 0.0166 (95% CI: [0.0102, 0.0474]). A low MMRV score indicates that the simulator reliably preserves the relative performance ranking of different models.
To identify the sources of sim-to-real divergence, the Genesis team built a real-time side-by-side testing rig. It runs both the simulator and the physical robot simultaneously from identical initial conditions. Observations — including camera feeds and proprioceptive data — can be sourced from the simulator, the robot, or a mix of both. By swapping one source at a time, the team can pinpoint whether discrepancies stem from physics, rendering, communication, or control.
After implementing these improvements, their reality gap is 45% smaller than the next-best alternative simulator, as measured by FID score on their benchmark dataset.
The Four Components of Genesis World 1.0
Nyx — Real-Time Path-Traced Rendering
Nyx is a GPU-powered path tracer that integrates into Genesis World as a camera sensor. It is distributed as the gs-nyx-plugin Python package, with prebuilt installers available for x86-64 Linux (manylinux 2.34+) and Windows 10/11. An NVIDIA GPU with CUDA support is required.
Nyx is designed to deliver noise-free 1080p frames within 4 milliseconds or less on a high-end
It runs on consumer GPU hardware, requiring neither precompilations (“baking”) nor motion-blur artifacts (“ghosting”). To achieve that, the renderer relies on a visibility buffer, a bindless GPU-driven pipeline architecture, MSAA, hardware-accelerated ray tracing, dedicated matrix cores, and hardware video compression.
Path tracing serves as the rendering foundation: multi-bounce light transport, soft shadows, and bounced (indirect) illumination all emerge naturally from the algorithm itself. A physically accurate camera model is layered on top. High-dynamic-range environment lighting uses actual measured radiance data. 3D assets are sourced from proprietary scanning rigs and photogrammetric reconstruction. Where conventional mesh modeling falls short, 3D Gaussian splatting fills the gaps.
Nyx processes physics in bulk batches instead of handling one scene at a time. This enables thousands of parallel training rollouts — each with its own unique environmental conditions, lighting, and camera path — to flow through one shared rendering pipeline.
Genesis World Physics — Unified Multi-Physics Engine
The Genesis World physics engine is open source (Apache 2.0 license) and simulates multiple physical domains within a single unified pipeline: articulated rigid bodies (MJCF/URDF/USD formats), FEM for elastic and deformable materials along with cloth, MPM for granular and elasto-plastic matter, SPH for fluid simulation, and PBD for fast cloth and position-based liquid dynamics.
Three interchangeable coupling modules are accessible through the same scene API: a fast general-purpose coupler; a Drake-style Semi-Analytic Primal coupler with hydroelastic contact modeling; and an Incremental Potential Contact (IPC) coupler that guarantees zero intersections in deformable scenarios. Switching among couplers takes a single line of code — no modifications to assets, sensors, or the policy interface are needed.
Genesis World 1.0 debuts two new solvers. The External Articulation Constraint (built atop libuipc) integrates joint-space dynamics directly into IPC’s optimization loop, meaning joint forces and contact forces are resolved together rather than being computed in separate, sequential solver passes. The second innovation is barrier-free elastodynamics, which swaps IPC’s logarithmic barrier approach for a custom augmented Lagrangian formulation. The standard IPC barrier produces a poorly conditioned Hessian matrix as contact points compress, making convergence difficult. The augmented Lagrangian formulation sidesteps this issue, letting every contact pair identified by continuous collision detection join the active constraint set right away. The team reports performance gains of up to 103× over conventional IPC in contact-dense scenes, while still maintaining intersection-free guarantees.
Other enhancements include new sensor modalities (point-cloud-based tactile sensing, thermal grid sensing, and proximity detection), an Implicit FEM solver using a Newton-CG iterative approach, and broader asset compatibility (URDF xacro preprocessing, MuJoCo general actuators, compound and mimic joints, equality and weld constraints).
Quadrants — Python-to-GPU Compiler
Quadrants is a cross-platform compilation framework for GPU-accelerated physics simulation, created by Genesis AI and distributed under Apache 2.0. Simulation kernels are authored in standard Python and then just-in-time compiled to NVIDIA CUDA, AMD ROCm, Apple Metal, Vulkan, and x86/ARM64 CPU targets via LLVM. The project originated as a fork of Taichi in June 2025. Its name draws from the classical Chinese philosophical idea that Taiji gives rise to the Four Symbols (Quadrants).
Notable performance gains compared with the original Taichi: up to 4.6× higher throughput on Genesis manipulation and locomotion benchmarks. JIT warm-cache initialization for single_franka_envs.py collapsed from 7.2 seconds to 0.3 seconds — over a 10× reduction. Reverse-mode automatic differentiation is now natively supported on every backend, making differentiable simulation fully portable across hardware platforms.
Each physics timestep is captured as a single consolidated kernel graph, eliminating per-step kernel launch overhead. Non-dependent kernels execute simultaneously across GPU streams. Dense linear algebra operations (Cholesky decompositions, triangular system solves) are compiled into 16×16 tiled code paths for efficient memory access. A performance-dispatch layer evaluates multiple kernel variants on first invocation and caches the optimal version for each function signature. Tensors share device memory with PyTorch tensors through DLPack, enabling zero-copy interoperability.
Installation:
Simulation Interface
The fourth component is the simulation interface: the tooling that wires together the physics engine, renderer, and compiler into a cohesive platform for downstream robotics workflows. This encompasses a photogrammetry pipeline for building digital replicas of real environments, an automated pipeline for procedurally constructing simulation scenarios (scene layout, asset selection, task definitions, and success criteria), and cross-embodiment environments that span multiple robot form factors.
Evaluation Framework
Genesis organizes evaluation as a taxonomy of independent perturbation axes spanning roughly 10 dimensions, following the methodology outlined in “A Taxonomy for Evaluating Generalist Robot Manipulation Policies”:
- Visual: lighting intensity and color, camera position/angle noise, background swaps
- Behavioral: novel object groupings, object positioning shifts, altered robot joint configurations
- Semantic: instruction paraphrasing, subtask resequencing, camera viewpoint changes
Along each axis, a single variable is perturbed while every other dimension stays at its baseline setting. The team defines robustness on a given axis as the fraction of baseline performance retained under perturbation. Sweeping perturbations across multiple checkpoints and model scales demands thousands of evaluation episodes per measurement point. This volume is only achievable because simulation-based evaluation requires no physical hardware.
Key Takeaways
- Genesis World 1.0 comprises four core components: Nyx (renderer), Genesis World (physics engine), Quadrants (compiler), and a simulation interface layer.
- Simulation evaluations correlate with real-world hardware rollouts at a Pearson coefficient of 0.8996, measured across 14 tasks × 200 episodes each.
- Robot policies are trained exclusively on real-world data; no synthetic data contributes to pretraining (achieving zero-shot real-to-sim transfer).
- The barrier-free elastodynamics solver delivers up to 103× speedup over traditional IPC in scenes with many simultaneous contacts.
- Quadrants delivers up to 4.6× higher runtime performance compared with upstream Taichi, and slashes warm-cache startup time from 7.2s to 0.3s.
GitHub Repositories:
Also, feel free to follow us on Twitter and don’t forget to join our 150k+ ML SubReddit and subscribe to our Newsletter. Wait! Are you on Telegram? Now you can join us on Telegram as well.
Need to partner with us on promoting a GitHub repo, Hugging Face page, product launch, webinar, or similar? Connect with us

Michal Sutter is a data science specialist who earned his Master of Science in Data Science from the University of Padova. Building on strong skills in statistical modeling, machine learning, and data engineering, he is particularly adept at converting intricate datasets into clear, actionable business insights.