



Orbbec provides various camera solutions designed for robotic perception, picking tasks, and navigation. Source: Orbbec
At the trade show, the robot appears flawless. It smoothly moves toward a bin, spots the target object, reaches inside, and precisely places the item where it belongs. The audience nods approvingly. Investors jot down notes. Engineers cheer with pride. But once the robot arrives at its real-world destination, reality no longer mirrors the polished demonstration.
This gap between demo performance and actual deployment remains one of robotics’ toughest ongoing hurdles. Machines that excel in controlled settings frequently falter when faced with changing lighting, shiny surfaces, see-through materials, moving pedestrians, and forklift activity.
Robots don’t need human-like vision. What they need is dependable, task-focused perception that can be accurately measured in real working environments.
The challenge of controlled environments
Laboratory settings typically give the perception system every benefit. Lighting, object placement, and backgrounds are carefully managed, and the robot operates under ideal circumstances. Real-world locations offer none of these advantages. Warehospital hallways, and production floors bring changing illumination, glossy surfaces, moving individuals, vibrations, and material inconsistencies.
Each of these factors can reveal flaws that never surfaced during demonstrations. What appears to be a planning or grasping issue may actually originate from sensing errors, calibration drift, or unreliable confidence estimates. A robot cannot effectively navigate around a depth map that appears certain but is actually incorrect.
Conventional 2D cameras continue to serve valuable purposes in recognition, quality inspection, and object tracking. However, a flat image cannot directly measure distance. Depth can be deduced from movement, learned assumptions, or multi-angle geometry, but these approximations frequently fail when lighting, surface patterns, obstructions, or materials shift.
This explains why 3D vision systems, depth cameras, and combined sensor approaches have become essential for deploying robots. Robots require actual spatial data from the physical world rather than clever interpretations of flat images.

Depth sensing encompasses multiple technologies
Robotic vision has evolved through several generations of sensing methods, each addressing certain challenges while creating new ones.
Initial robotic vision setups depended mainly on 2D cameras combined with highly controlled surroundings. Factory robots operated with predetermined part locations, fixed orientations, and consistent lighting. Often, the precision came from the fixture rather than the sensor itself.
Structured light systems cast a known pattern across a scene and calculate depth by analyzing how that pattern warps. This technique can perform effectively for indoor inspection and measurement tasks. Yet, it may struggle with ambient lighting, movement, reflective or transparent surfaces, and interference from other active light sources.
Stereo vision employs two separated cameras to gauge depth. By identifying matching points between both images, the system calculates disparity and translates it into distance. Passive stereo relies on surface texture and lighting; active stereo incorporates infrared projection for textureless scenes. Stereo setups can scale effectively for robotics, but challenges like low texture, repeating patterns, motion blur, obstructions, reflective materials, and distance limitations all play a role.
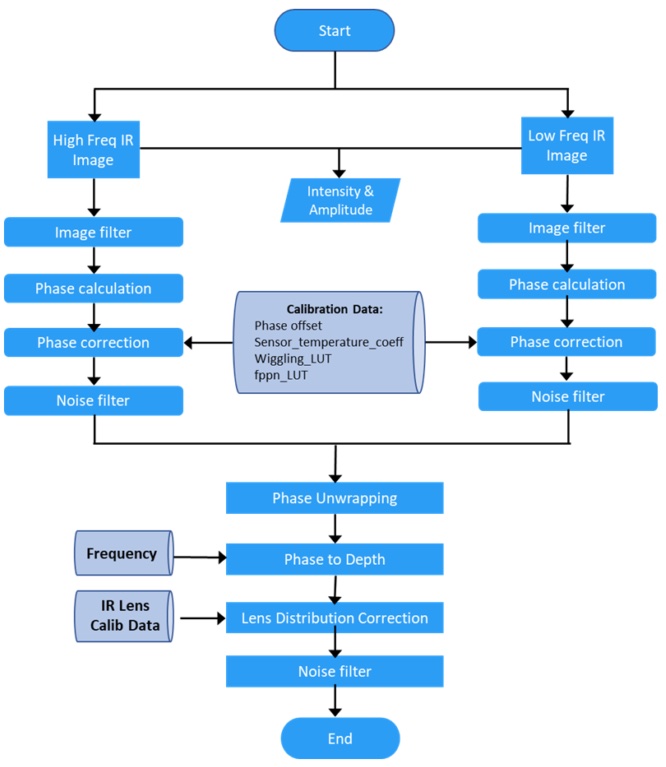
Time-of-flight (ToF) technology measures distance based on returning infrared light. ToF cameras can be small, rapid, and effective for detailed depth mapping, but ambient infrared interference, multipath reflections, shiny surfaces, and range confusion can all skew outcomes.
The practical takeaway is straightforward: no single sensor type excels in every situation. Structured light, stereo, ToF, lidar, RGB cameras, and inertial measurement units (IMUs) each serve important functions. The optimal selection depends on the specific task, required range, lighting conditions, materials involved, movement, computing resources, safety requirements, and acceptable failure rates.
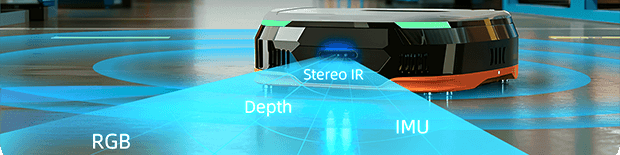
Successful 3D robotic perception relies on multiple sensing technologies. Source: Orbbec
AI improvements help, but cannot replace dependable measurements
It’s easy to believe that AI can overcome sensor limitations. AI can significantly enhance robotic perception capabilities. It can clean up depth maps, fill missing areas, merge RGB with depth data, predict object poses, and follow movement patterns.
AI still requires trustworthy physical input. A robot needs depth readings that are accurate enough to base actions on. This distinction becomes critical near people, valuable products, or heavy equipment.
For real-world deployment, perception systems need precise measurements, uncertainty tracking, validation processes, and graceful fallback behavior. When a sensor becomes overwhelmed, loses surface detail, passes through glass, picks up multipath reflections, or drifts from calibration, the system should flag reduced confidence rather than quietly forwarding flawed spatial data downstream.
In robotics, a perception error that appears confident is typically more hazardous than one that fails obviously.
Perception systems in robots require sufficient real-world data to ensure certainty, according to Orbbec.
What real-world deployment actually demands
Deployment is where tough challenges typically surface. A robot might perform flawlessly during integration, yet stumble on edge cases that were missed in the lab: black rubber surfaces, shiny packaging, transparent film, sun-drenched doorways, vibration, dust, or interference between multiple active depth cameras.
Deployment teams should assess perception systems across the entire operating range. The key question is whether the perception stack can deliver dependable spatial data under the conditions that truly matter for the task at hand.
Assessment should include depth accuracy, latency, calibration stability, computational demands, mechanical compatibility, and resistance to dust, vibration, and interference. It should also account for challenging surfaces like glossy, dark, transparent, metallic, and low-texture materials.
Lighting should be treated as a variable, not a fixed background condition. A system that excels under controlled indoor lighting may behave unexpectedly under direct sunlight, mixed LED sources, flickering lights, shadows, or near-infrared interference. Multi-camera setups should also be thoroughly tested, particularly when active illumination is being used.
Readiness for deployment stems from consistent performance across the full spectrum of real-world operating conditions, including the tricky edge cases that rarely make it into a polished demo video.
Sensors and cameras need to be fine-tuned for diverse materials and environments, says Orbbec.
What’s next for machine perception?
The robotics industry is full of bold ambitions. Humanoid robots, self-operating warehouses, hospital logistics, and factory automation all rely on machines that interpret the physical world reliably enough to act within it.
Advancements in robotic perception will come from improved depth sensing, sensor fusion, online calibration, and validation. Stereo systems will keep advancing with more powerful matching algorithms and neural processing. ToF systems will see gains from enhanced modulation schemes, multipath mitigation, dynamic range, and sensor fusion.
Structured light will stay valuable for controlled close-range measurement and inspection. RGB, depth, lidar, IMU, tactile sensing, and semantic models will increasingly collaborate rather than compete as isolated technologies.
The most significant progress might be less flashy than a new algorithm: perception systems that recognize when they are uncertain, degrade gracefully, and share useful confidence data with planning and control. Robotic perception must have enough accuracy, speed, and uncertainty awareness to support the task.
Bridging the gap between deployment and demo performance starts with building perception systems for the world robots actually face, not the world we wish they operated in.

About the author

David Chen holds a Ph.D. in engineering mechanics with a focus on optical measurement systems. He has been developing RGB+Depth cameras since 2009 and, since joining Orbbec Inc. in 2013, has played a key role in the successful global launch of over 10 products.
Orbbec offers products spanning structured light, stereo vision, ToF, and lidar technologies. The company stated its sensors are used in robots and manufacturing, logistics, retail, 3D scanning, healthcare, and fitness systems.