



Sponsored by GAM.
Think about a small youngster attempting to push a full-size grownup in a procuring cart. It’s doable to get the cart shifting (barely), however it will be very laborious to begin or cease. Steering might be disastrous—the kid might not make it round a nook in time.
A excessive inertia ratio between a load and a servo motor is sort of a small youngster pushing a heavy cart; it will be tough to begin and cease, and response could be sluggish. (Picture courtesy of GAM.)
“In servo tuning, this is when you don’t have enough of a ratio in your gearbox, and your inertia ratio between your motor and load is too high,” says Matt Ruggles, senior design engineer at GAM, a U.S.-based producer of servo gear reducers and different movement management elements.
Now contemplate a big grownup who doesn’t know their very own power, pushing a small youngster in a procuring cart. They might fully overpower the cart, making turns too quick and throwing the kid round contained in the basket, probably hurting them.
“This would be the opposite end where the motor inertia is much higher than the load inertia,” says Ruggles. “You’ve probably put more money into your motor and drive than you need to, and you can damage your equipment by changing the motion too quickly.”
Inertia matching is a key consider sizing a servo system. It refers back to the ratio between load inertia and motor inertia, which impacts a motor’s means to manage its load throughout acceleration and deceleration.
Inertia Ratio = JLOAD / JMOTOR
the place JLOAD is the load inertia mirrored to the motor and JMOTOR is the motor inertia. Load inertia consists of all rotating elements within the system, such because the drive, exterior mass and coupling.
Designers should decide what inertia ratio is appropriate primarily based on the dynamics of the movement and the extent of accuracy required. A 1:1 inertia ratio is taken into account very best as a result of it gives one of the best management and is best to tune. Nevertheless, striving for an ideal match isn’t at all times sensible, and pushing too shut can result in an outsized motor, greater system value and elevated power consumption.
“Typically, these days you can get up to a 10:1 ratio where the load is 10 times bigger than the motor,” says Ruggles. “Once you get beyond that, the servo tuning starts to become much more difficult. It used to be you’d try to get within 5:1, but servo controls have gotten much better.”
When inertia matching is poor as a consequence of a excessive inertia ratio or improper tuning, the system might reply sluggishly and produce vibration or noise. The load might fail to settle at its supposed place, persevering with to float as an alternative of reaching its endpoint. It could overshoot its goal, then oscillate forwards and backwards because the motor tries to compensate. Because the motor is working more durable to manage the load, it will additionally draw extra present, impacting effectivity and value.
One approach to get a smaller motor to manage a bigger load is to deliver a excessive inertia ratio nearer to 1:1 by including a gearbox.
JREFLECTED = (JLOAD / i2) + JGEARBOX
the place i is the gearbox ratio, and JGEARBOX is the inertia of the gearbox.
“The ratio of the gearbox impacts the inertia ratio by a square factor—so a 10:1 gearbox has a 100:1 impact on the inertia ratio,” explains Ruggles. “You can get a big advantage very quickly by adding a gearbox to your system.”
Whereas the gearbox itself provides inertia to the system, its contribution is small in comparison with the discount achieved via the gear ratio.
Correct servo tuning may counteract the results of a excessive inertia ratio by giving the servo motor a greater sense of methods to management the load. Going again to the procuring cart analogy, it’s just like the youngster pushing the cart studying to anticipate the way it will react, slowing down forward of a flip or making ready prematurely to cease on the finish of the aisle.
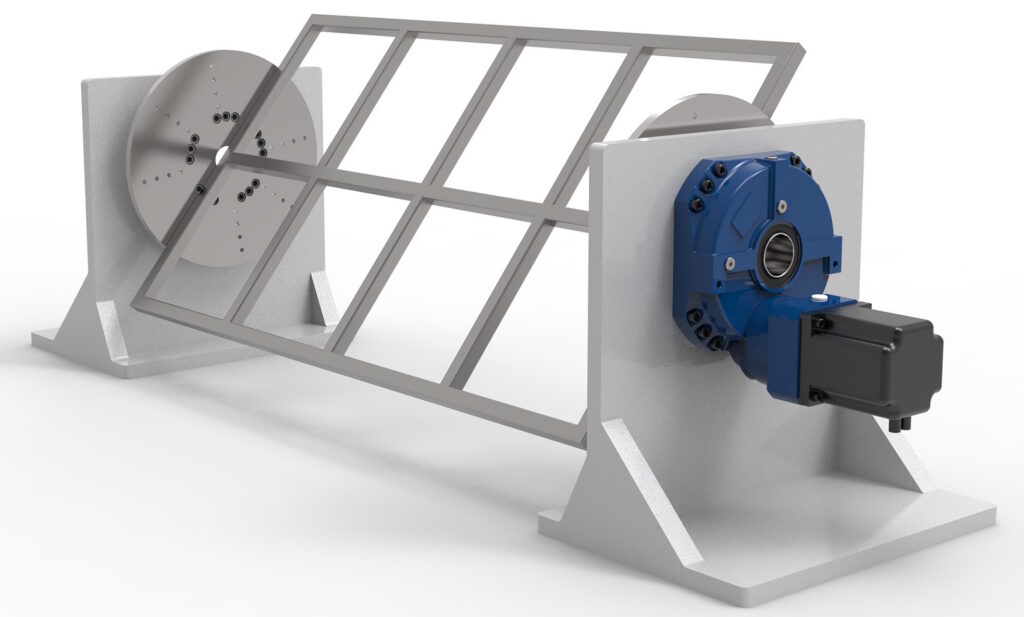
Utilizing a excessive ratio, precision gearbox, akin to GAM’s GPL robotic planetary, brings the inertia ratio nearer to 1:1, permitting a smaller motor to exactly management the massive, heavy load of a trunnion, for instance, generally used as robotic weld positioners in automotive purposes. (Picture: GAM.)
One other approach to cut back the inertia ratio is to make use of a bigger motor with greater inertia. Nevertheless, bigger motors are sometimes dearer and run at decrease speeds.
“The trick with adding a gearbox is that it is going to slow down the output speed based on what the motor is spinning at,” says Ruggles. “If you try and use a large inertia motor that can’t run very fast combined with a gearbox, now your output is going to be very slow.”
Functions that depend on decrease inertia ratios embody methods with excessive acceleration and deceleration or exact positioning calls for; for instance, robotics within the packaging business want bottles to line up completely with a nozzle after which swiftly transfer out of place.
GAM presents a variety of gearbox choices, from high-performance options to cheaper designs.
“Application requirements can drive what type of gearboxes and motors you use, all the way down the system,” says Ruggles. “We have a full engineering team for the more fun designs where you really have to dive in and do some problem solving in order to achieve what the customer is looking for.”
To be taught extra, go to GAM.
The put up How gearbox ratio choice impacts inertia matching, servo tuning, and machine efficiency appeared first on The Robotic Report.