



In a earlier article, we detailed instance integrations of movement management and robotics. So, what in regards to the workcells and methods surrounding the robotics of their workcells? Varied automated methods can serve, transfer, and improve a robotic to maximise its usefulness.
There are numerous complexity ranges with these peripheral movement methods. The act of machine tending is less complicated than meeting — and most meeting duties are in flip less complicated than operations involving conveyance.
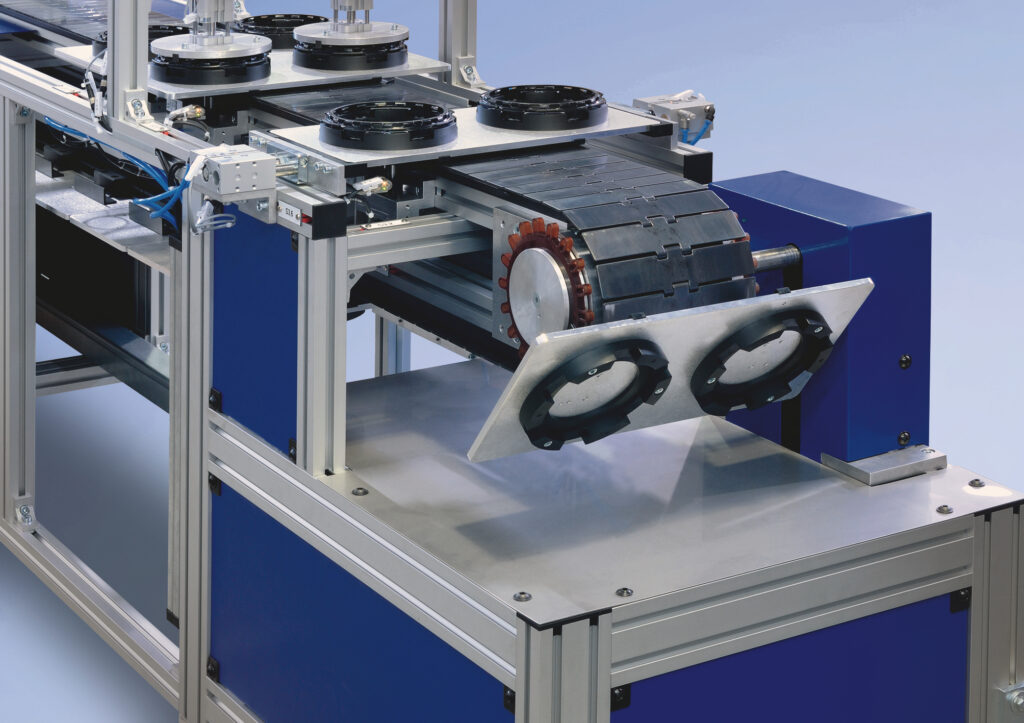
The latter represents materials dealing with within the type of pick-and-place capabilities (as seen beneath) needing the coordination of all of the robotic axes and finish effector with the conveyor. For such setups, the situation of the robotic relative to the conveyor, together with a complete host of different parameters, may be optimized in simulation software program for minimized arm journey.
After all, no dialogue of peripheral movement methods that complement robotics can be full with out mentioning seventh-axis methods — additionally referred to as “robot-transfer units” or RTUs.
Engineers can purchase pre-engineered RTUs or construct them in-house utilizing motion-system experience. The best RTUs are linear-track pairs bearing platforms to which the robotic bolts.
Nevertheless, many OEMs enlist devoted integrators for conditions the place robots on RTUs will carry out high-precision jobs. For instance, it could possibly be a slicing activity, the place the design should synchronize the articulation of a number of axes, or transferring castings by varied machine instruments for processing.
It is a Bishop-Wisecarver seventh-axis answer. Credit score: Lisa Eitel
The most important problem to engineering RTUs is programming them to synchronize with the articulation of the robotic arms they carry. The second-biggest problem is getting RTUs to take care of correct linear movement over many meters.
But different linear movement applied sciences complement robotic workcells. Right here we see PBC Linear’s Utilized Cobotics cobot feeder — an automatic rack for a CNC machine tending purposes.
Extra particularly, the part-feeding system delivers and levels elements going right into a machining course of. The answer has Common Robots‘ UR+ accomplice certification.
The cobot feeder features a storage and retrieval meeting with a UR force- and power-limited robotic pedestal, enclosed metal rack dunnage tower with a 17-tray capability for holding workpieces to 22.6 kg (50 lb.), and a touchscreen human-machine interface (HMI). It additionally consists of Ethernet IP, Modbus, and customary UR cobot communications.
Main candidates for such machine-tending peripheral methods are these which can be particularly difficult. The video clip beneath reveals how machine builder Card-Monroe makes use of the Utilized Cobotics feeder within the manufacturing of its complicated tufting machines — which may have 50,000 elements.
The feeder helps automate the staging and dealing with of elements going into CNC machines. By automating this machine tending, Card-Monroe achieved a 78% discount in labor prices.
Eighth-axis vertical RTUs are one other linear-motion answer for robotic workcells. Bishop-Wisecarver’s RTU-V is an extension of LoPro RTU-L and -M choices. Vertical strokes attain 4 m (13.1 ft.) to increase robotic-arm attain in logistics, manufacturing, agriculture, and packaging.
This type of eighth-axis RTU can be helpful the place robotic arms work on outsized assemblies akin to rocket tubes, boat hulls, and aerospace constructions.
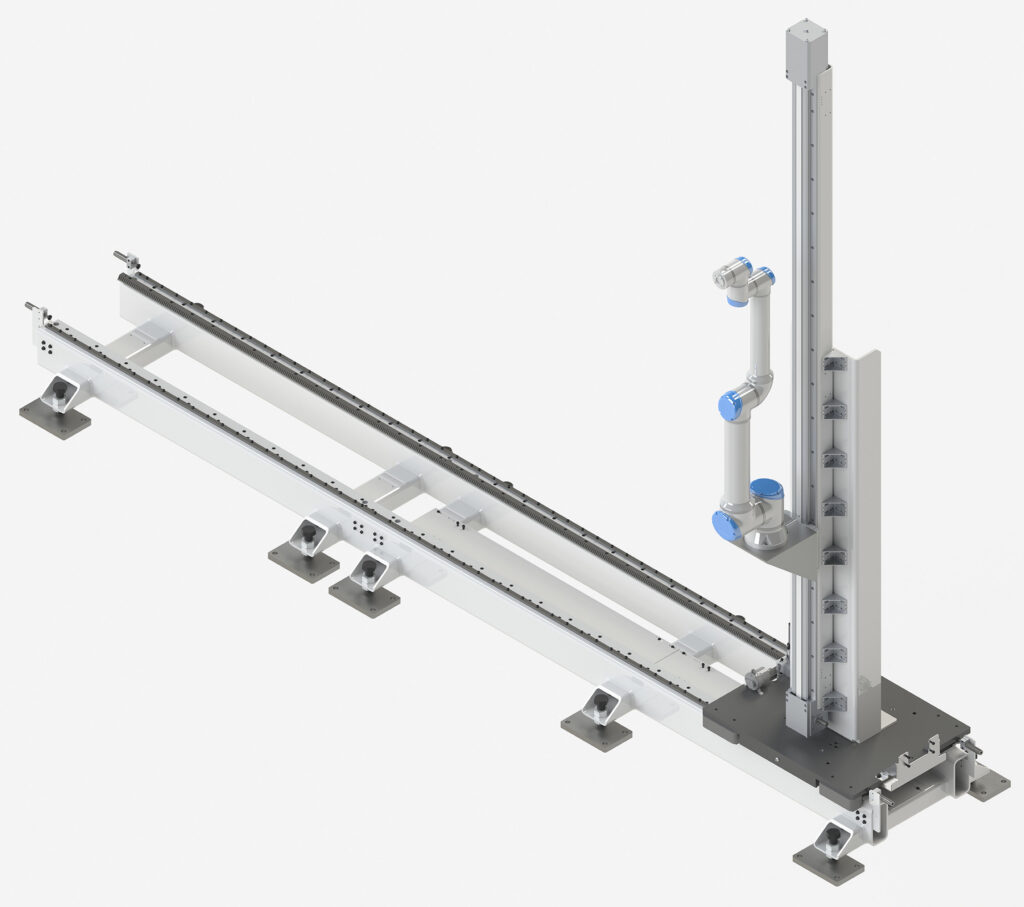
Appropriate with LoPro elements and the DualVee RTU-H, this RTU-V may be mounted vertically to ship two-axis movement.
One caveat: These want a structural mounting bracket to take care of stability and precision. In different phrases, they will’t simply be mounted on to a manufacturing facility wall. That RTU-V mounting bracket bolts to the manufacturing facility flooring or to a DualVee RTU-H.

Eighth-axis methods can help the meeting of outsized assemblies akin to plane constructions. Supply: Adobe Inventory
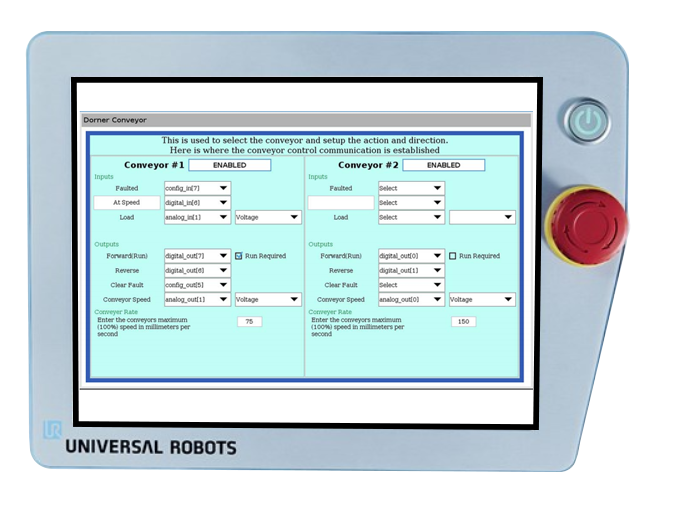
UR software program plug-ins enable for conveyor configuration and management. | Supply: Common Robots
The particular case of conveyor tending
As talked about, robotic tending of conveyors is maximally difficult. Conveyors contain variable speeds and variable workpiece positions, until puck and pallet-fixture conveyors that cradle workpieces are used.
Conveyors are movement designs in their very own proper with belt or energy curler, motor, braking, and management components all needing consideration for workcell coordination.
This SPU recirculating pallet conveyor is appropriate for in-line accumulating purposes. This model proven here’s a single-wide variation for buffering areas and compensating for various cycle occasions upstream and downstream. Supply: mk North America
“Where we see a greater increase in collaborative robots is in smaller operations — less than 1,000 employees — where the automation work is being done in-house,” stated automation distributor BRAAS Co. product specialist Dan Toynton. BRAAS works carefully with a number of automation producers in designing customized integrations of conveyors and robotics for the packaging trade.
The method of conveyor-robot integration begins with robotic producers — usually utilizing their software program for set up and programming. Then OEMs or plant engineers can piggyback off that design work to construct out the workcell.
The software program plug-ins of some robotic producers may even configure and management conveyors and their equipment. As soon as this system is put in, conveyors get added to the programming with inputs and outputs for beginning, stopping, referencing speeds, and monitoring standing. This integration acts as a handshake between the conveyor and robotic and even lets operators run a number of conveyors off a controller at one time — and monitor world efficiency.

Pallet-fixture conveyors more and more frequent in automotive-component, medical-device, and electronics manufacturing, in addition to automated product testing and inspection. | Supply: Adobe Inventory
Robotic purposes run with less complicated controls and blindly transfer to workpieces, in order that they want these workpieces to be in an actual location on the conveyor. However one thing must impart precision to the operation. In lots of such circumstances, this comes from a servo-driven conveyor. Trade-typical repeatability for servo-driven belt conveyors is to ±0.75 mm at 100 indexes per minute.
Linear-transfer methods primarily based on direct-drive tracks (akin to linear motors stretched right into a racetrack conveyance loop) may be 10 occasions extra exact, with ±0.075 mm repeatability. However with conveyance this exact, articulated robotic arms aren’t the frequent pairing. As a substitute, stationary meeting equipment is extra typical, as illustrated by this Beckhoff instance:
XTS Linear product transport. | Supply: Beckhoff USA
Pallet-fixture conveyors (to not be confused with tools that strikes skids) are one other answer to make sure workpieces aren’t each which manner once they’re offered to the robotic arm. These are seeing elevated adoption and pairing with robotics. That’s as a result of such conveyors may be configured or programmed to start out and cease at particular intervals to sync with robotic duties.
If the workpieces on a conveyor are each which manner, machine imaginative and prescient or one other answer could also be wanted to find out workpiece location and orientation relative to the robotic’s coordinate body.
Editor’s be aware: This text was syndicated from The Robotic Report sibling website Design World.